Robótica / Exploración Espacial
Robots autónomos colaborarán con la tripulación humana en futuras misiones a la Luna
Serán vitales para mover cargas, desarrollar infraestructura y recoger muestras de experimentos en las primeras colonias humanas lunares
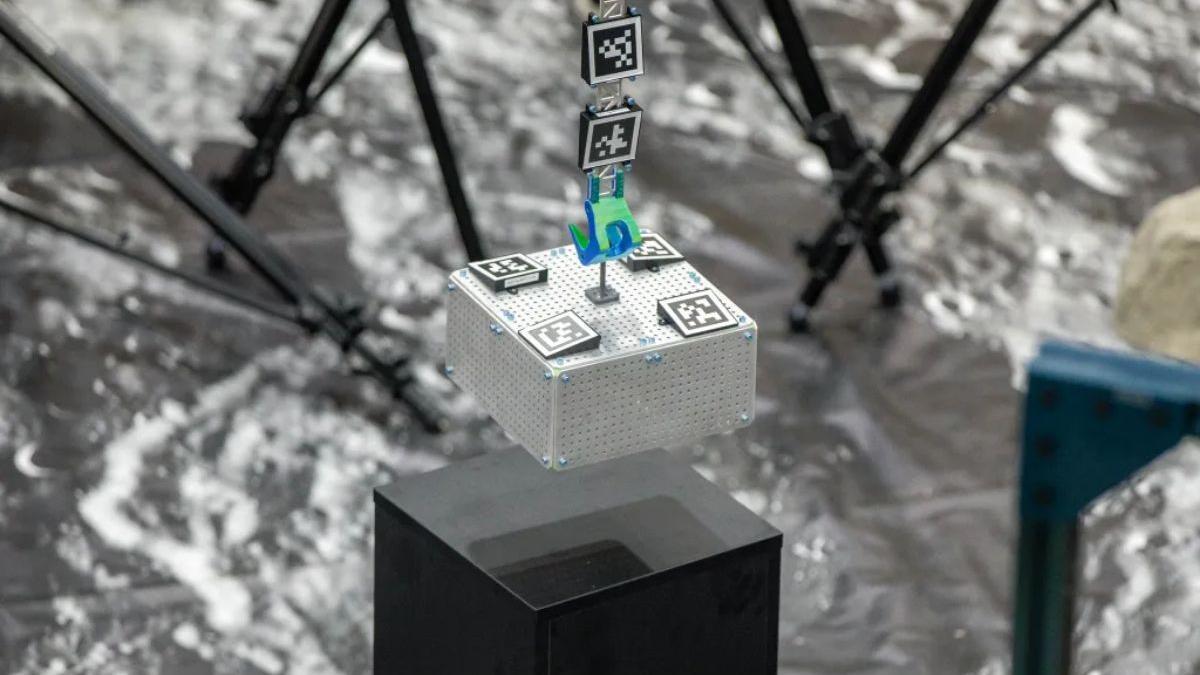
El sistema de robots autónomos que se desplegará en la Luna trabaja mediante el uso de sensores integrados para escanear marcadores codificados en una carga útil, algo similar a un código QR, revelando información crítica sobre su posición y orientación. / Créditos: NASA/David C. Bowman.
Pablo Javier Piacente
Un sistema de robots independientes que ya ha sido probado con éxito en entornos terrestres simulados promete agilizar y optimizar las primeras tareas a realizar en futuras misiones tripuladas a la Luna: según los científicos, son capaces de ubicarse a través de un sistema de sensores que logran escanear marcadores semejantes a un código QR, revelando su posición y determinando dónde deben recoger o llevar cargas útiles y otros elementos.
La NASA informó recientemente el éxito de las primeras pruebas de un sistema denominado LANDO, que consiste en el desarrollo de robots autónomos dedicados a realizar tareas vitales de soporte en futuras misiones tripuladas a la Luna, concretamente en el marco del programa Artemis o Artemisa. Los dispositivos robóticos lograrán ubicarse de manera independiente en el entorno lunar, movilizando cargas útiles, recogiendo muestras de experimentos o colaborando en el desarrollo de infraestructuras.
“Códigos QR” para robots autónomos en la Luna
Según una publicación de la agencia espacial estadounidense, los investigadores lograron combinar diferentes adelantos en términos de hardware y software, haciendo posible que los robots se encuentren equipados con un sistema de posicionamiento mediante sensores. Los mismos les permiten leer o escanear marcadores codificados, en un esquema similar a los códigos QR: de esta manera, pueden determinar la ubicación de una carga útil y saber hacia dónde deben dirigirse para cumplir con las tareas asignadas.
Los especialistas del Centro de Investigación Langley de la NASA realizaron pruebas y demostraciones de la nueva tecnología en un área configurada para parecerse a la superficie lunar: en un primer ejercicio, colocaron una pequeña caja de metal en un pedestal negro. Al accionar el dispositivos, los sensores en el brazo del robot escanearon el área circundante, buscando la carga útil que debía recoger.
Resultados prometedores
La caja de metal estaba equipada con los marcadores codificados mencionados previamente, que revelaban información crítica sobre su posición y orientación. Usando una interfaz gráfica, uno de los miembros del equipo seleccionó el sitio en el cual el dispositivo robótico debía dejar la carga. Luego de una serie de movimientos lentos y metódicos, el robot atrapó la caja y la transportó hacia el lugar indicado dentro del área simulada, dotada de características similares a las que pueden hallarse en la Luna.
“Hemos logrado probar la repetibilidad del sistema, moviendo múltiples cargas útiles para mostrar que los robots pueden ser consistentes y eficaces en sus tareas. También demostramos su capacidad para moverse a través del espacio y planificar un camino alrededor de obstáculos”, indicó en la publicación de la NASA la científica Julia Cline, líder del equipo de investigadores. Los robots autónomos serán vitales en tareas científicas y para el desarrollo de infraestructuras en colonias humanas en la Luna y, posteriormente, en las misiones planificadas hacia Marte.
- Los videntes coinciden: este será el número que ganará 'El Gordo' de la Lotería de Navidad
- El expolicía 'influencer' que sorteaba coches de lujo pertenecía a una trama que blanqueaba dinero del narcotráfico
- La Cúpula de Hierro de Israel: el escudo antimisiles más potente del mundo lo manejan veinteañeros que hacen la mili
- Óscar Pierre, CEO de Glovo: trabajando no llegas nunca a ningún lado
- Doña Manolita no se hace tan de oro con la Lotería de Navidad: su beneficio es de 'solo' 700.000 euros
- La DANA de Valencia dispara la fiebre por este número en la Lotería de Navidad: no es el que todos creen
- David Bisbal cantará desde el balcón de la Real Casa de Correos en Sol: fechas y horarios
- La macrofiesta del padre Ángel en el Bernabéu para 200 personas en riesgo de exclusión social: “No hace falta ser cura para ayudar a los demás”